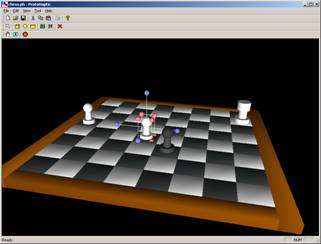
ProtoHaptic is an interactive haptic prototyping application which supports SensAble haptic devices.
The program is built upon the existing OpenHaptics API and facilitates the interactive construction and manipulation of a three dimensional environment that has both graphics & haptics integrated in to it.
Primitive objects may be added and positioned in the scene and various familiar transformations such as scaling and rotation applied to them. In addition to the usual geometric operations the editor provides the ability to change the haptic properties of the scene such as the stiffness of an object, or the lateral friction produced by a surface.
Primitive objects may be added and positioned in the scene and various familiar transformations such as scaling and rotation applied to them. In addition to the usual geometric operations the editor provides the ability to change the haptic properties of the scene such as the stiffness of an object, or the lateral friction produced by a surface.
It is intended that the final product will provide a user friendly alternative to programming, for the purposes of rapidly prototyping a simple haptic environment. Visit http://protohaptic.googlecode.com for more information.
Features:
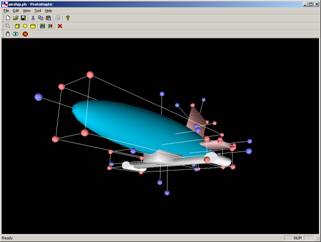
- Primitive Objects: Cube, Sphere, Cylinder, Triangle, Torus.
- Transformations: Translation, Scaling, Rotation and other object specific transformations.
- Real time editing of haptic properties: Stiffness, Static Friction, Dynamic Friction and Damping.
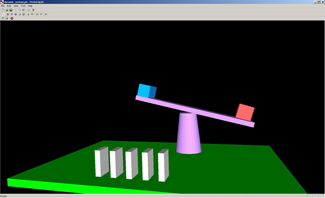
- Rigid body dynamics and collision detection for creating dynamic haptic scenes
- Export code for created scenes: C Code using OpenGL API, C++ Code using AbstractModel API
- Import code to create scene: C++ Code using AbstractModel API, C++ Code using GHOST API
Licence
ProtoHaptic is freely available Open Source software released under the GPL.
Credit
ProtoHaptic was designed and implemented by Neil Forrest.
Visit https://code.google.com/archive/p/protohaptic/ for more information.
Haptic Application Gallery: Disclaimer
3D Systems has posted the information in the haptic gallery in the spirit of sharing information among the haptics community.
Each of the individuals or organizations described or portrayed on the Haptic Gallery provided the material included therein. All information, data, text, software, music, sound, photographs, graphics, video, messages or other materials posted in the Haptic Gallery ("Content") are the sole responsibility of the person or organization from which such Content originated. 3DSystems does not guarantee the accuracy, integrity or quality of such Content. In no event shall 3D Systems be responsible or liable, directly or indirectly, for any damage or loss caused or alleged to be caused by or in connection with the use of or reliance on any such Content. 3D Systems maintains all rights in its intellectual property portfolio. Inclusion in the Haptic Gallery does not create any implied license of any kind with respect to any 3D Systems property. 3D Systems reserves the right to decline to post or remove any Content from the Haptic Gallery.